Американцы пытались отслеживать перемещения советских подводных лодок с помощью уникальной системы.
Американцы пытались отслеживать перемещения советских подводных лодок с помощью уникальной системы.Система SOSUS - подводное «ухо» США
 Американцы пытались отслеживать перемещения советских подводных лодок с помощью уникальной системы.
Американцы пытались отслеживать перемещения советских подводных лодок с помощью уникальной системы.


Секретное задание
В один из августовских вечеров 1962 года подводная лодка Б-75 проекта 611 под командованием капитана 2 ранга Николая Натнёнкова вышла из Полярного и, прошмыгнув мимо постов наблюдения, скрылась в глубинах Баренцева моря. О том, куда следовать дальше, командир узнал из вскрытого им пакета. Маршрут пролегал через Северную Атлантику к Восточному побережью США с задачей ведения разведки береговой системы гидроакустического наблюдения. К тому времени такая система существовала уже одиннадцатый год, но знали о ней очень мало. Сведения об американском секретном «ноу-хау» для наблюдения за подводными лодками собирали по крупицам много лет. Впервые информация о ней в открытой печати появилась в 1980-х годах, но профессионалам подробности были известны раньше…
 Работа центрального поста подводной лодки ВМС США.
Работа центрального поста подводной лодки ВМС США.Возможно, мы никогда бы эту историю и не вспомнили, если бы в сентябре этого года не закипела «буря в стакане». Агентство Reuters опубликовало статью о подводном шпионаже США против Китая с применением IUSS - интегрированной системы подводного наблюдения, основу которой составляет SOSUS (Sound Surveillance System, звуковая система наблюдения) - та самая, на поиски которой в августе 1962 года и отправилась Б-75. В информационном поле разгорелись страсти, и путая спутный след летательного аппарата с кильватерным от корабля, политологи, экономисты, публицисты кинулись в рассуждения по теме. Между тем шпионаж и подводное наблюдение, согласитесь, понятия разные. Поговорим о втором.
Гений да Винчи
Казалось бы, при чём здесь великий итальянский художник, изобретатель и великий учёный эпохи Возрождения в одном лице? А ведь описание первого простейшего прибора для подводного наблюдения сделал именно он. «Если остановить корабль и погрузить конец длинной трубки в воду, а другой конец поднести к уху, вы услышите корабли, находящиеся на больших расстояниях» - эти строки найдут исследователи в его записях. А если использовать две трубки, то можно определить направление на источник шума в воде.
Идея великого Леонардо нашла практическое применение лишь в конце XIX века, когда плавучие маяки стали оборудовать подводными колоколами, а на морских судах устанавливать простейшие гидроакустические приёмники на оба борта, чтобы слышать и определять направление на навигационную опасность.
Но настоящий интерес к гидроакустике возник при появлении на морских театрах военных действий (ТВД) подводных лодок, ставших грозой не только для военных кораблей, но и торгового мореплавания.
Весной 1944 года с исследовательского судна США Buckley, шедшего по заранее выбранному маршруту, сбрасывали в воду взрывные источники звука с заданной глубиной подрыва, фиксируя взрывы с помощью специальной аппаратуры. Исследования привели к идее создания системы спасания на море на основе шумопеленгаторных станций, получившей название SOFAR (Sound Fixing and Ranging). Мысль была актуальной, так как авиационные противолодочные патрули США и Великобритании активно применялись на Атлантическом и Тихоокеанском ТВД. К тому времени на кораблях и подводных лодках уже стояли современные на тот период гидроакустические станции (ГАС), но дальность их действия была невелика.
SOFAR же предполагалось создавать как береговой комплекс с вынесенными в море гидрофонами. Этому способствовали открытия в области распространения звука в воде - подводного звукового канала (ПЗК) и дальних зон акустической освещённости (ДЗАО), они же зоны конвергенции, образующиеся в глубоком море при определённых типах вертикального распространения скорости звука, коих насчитывается семь. Как описывает это бывший редактор журнала «Подводная война» доктор Эдвард Уитмен, согласно концепции SOFAR, сбитые пилоты должны были сбрасывать небольшие заряды взрывчатки на глубину ПЗК, чтобы их звуковой сигнал, распространяясь на тысячи миль, достигал донных гидрофонов, помогая запеленговать местонахождение выживших.
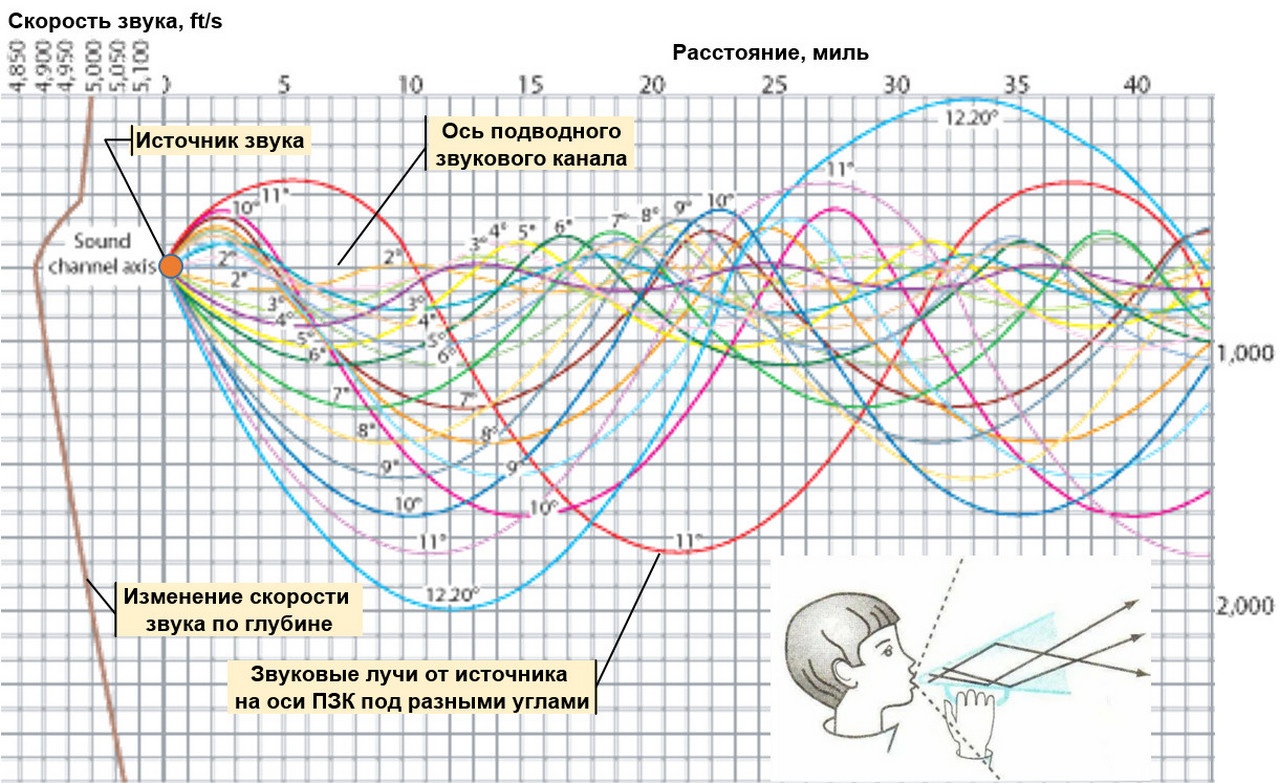 Диаграмма распространения звука в воде от заглублённого источника на оси ПЗК при типе ВРСЗ №6.
Диаграмма распространения звука в воде от заглублённого источника на оси ПЗК при типе ВРСЗ №6.К началу 1950 года в американском флоте пришли к выводу, что наибольшую угрозу безопасности представляют подводные лодки ВМФ СССР. За изучение проблемы взялся Комитет по подводной войне (CUW), где вскоре пришли к выводу, что звук на частоте ниже 500 Гц может проникать в ПЗК практически с любой глубины и распространяться на расстояния, достаточные для пассивного обнаружения подводных лодок на дальности в сотни миль. Это легло в основу создания системы гидроакустического наблюдения SOSUS, благодаря которой холодная война под водой приобрела особые очертания.
Не моргайте, лофаграмма рисует ваш портрет
Опытное развёртывание элементов SOSUS началось в конце 1950 года с установки подводных систем прослушивания у берегов косы Санди-Хук (штат Нью-Джерси) и острова Элетера (Багамские острова). Для регистрации низкочастотных шумов под новые задачи был адаптирован звуковой спектрограф, до этого применявшийся для анализа речи.
В результате получился новый прибор под названием LOFAR (Low-Frequency Analyzer and Recorder) - низкочастотный анализатор и регистратор (самописец), который на матричном принтере с электрохимической бумагой выписывал лофаграмму в виде частотного спектра шума подводной лодки от каждого гидрофона, ориентированного в конкретном направлении. Лофаграмма рисовала не что иное, как гидроакустический «портрет», по которому можно было распознавать каждую боевую единицу.
Первый прототип SOSUS (линейная решётка длиной 300 метров из 40 гидрофонов на глубине 450 метров) американцы развернули на дне у острова Элетера в январе 1952 года. После серии успешных испытаний было решено установить аналогичные системы вдоль Восточного и Западного побережья США, а также на Багамских островах, в Исландии, Великобритании, Алеутских островах, Гавайях и т.д.
Воспринимаемые гидрофонами шумы передавались на береговые станции обработки данных NAVFAC (Naval Facilities) по многожильным бронированным кабелям. Получаемые записи анализировались в поисках отличительных частот шума подводной лодки. При их обнаружении на нескольких регистраторах от гидрофонов, расположенных в разных местах, методом триангуляции определялось местоположение цели.
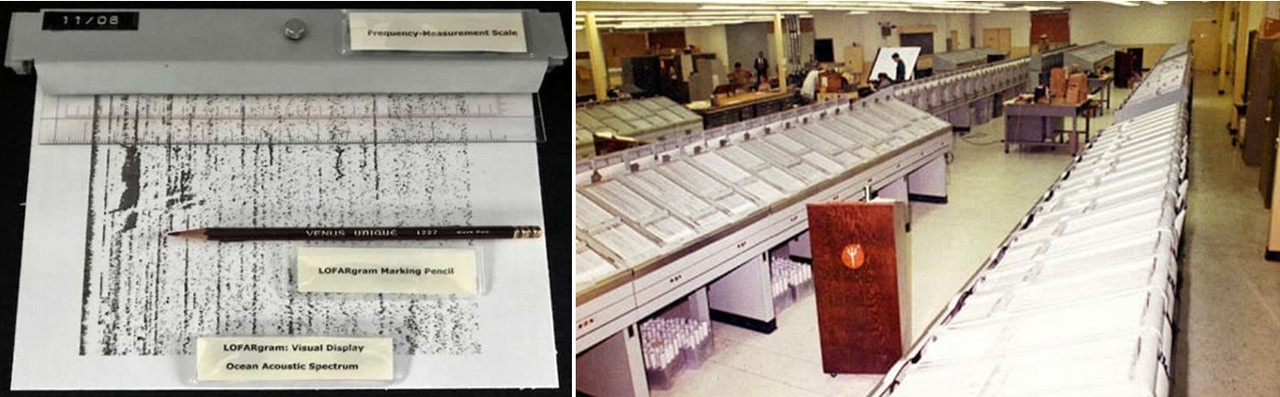 Слева - изображение лофаграммы, справа - столы с матричными принтерами станции NAVFAC.
Слева - изображение лофаграммы, справа - столы с матричными принтерами станции NAVFAC.Полномасштабная работа по развёртыванию SOSUS проходила до 1978 года по обеим сторонам Американского континента с помощью судов-кабелеукладчиков ВМС США Neptun и Albert J. Myer. В результате была создана некая «зона ограничения/воспрещения доступа» к побережью США наших подводных лодок с баллистическими ракетами малой и средней дальности, получивших в дальнейшем аббревиатуру РПЛСН. Например, РПЛСН проекта 667А имели на вооружении комплекс Д-5 с 16 баллистическими ракетами Р-27, которые могли применяться с дальности до 2400 км, что вынуждало вести боевое патрулирование практически в зоне действия SOSUS, по данным которой наводились манёвренные противолодочные силы противника.
Сначала налетала базовая патрульная авиация, загаживая море своими буями, а потом приходила корабельная поисковая ударная группа (КПУГ) и принимала контакт. Если не было КПУГ, то следила подводная лодка супостата, но, как говорится - «хрен редьки не слаще». Командиры отрывались от слежки, используя условия среды, проходящие торговые суда, имитационные приборы, личный опыт, находчивость, смекалку и тот самый манёвр «бешеный Иван».
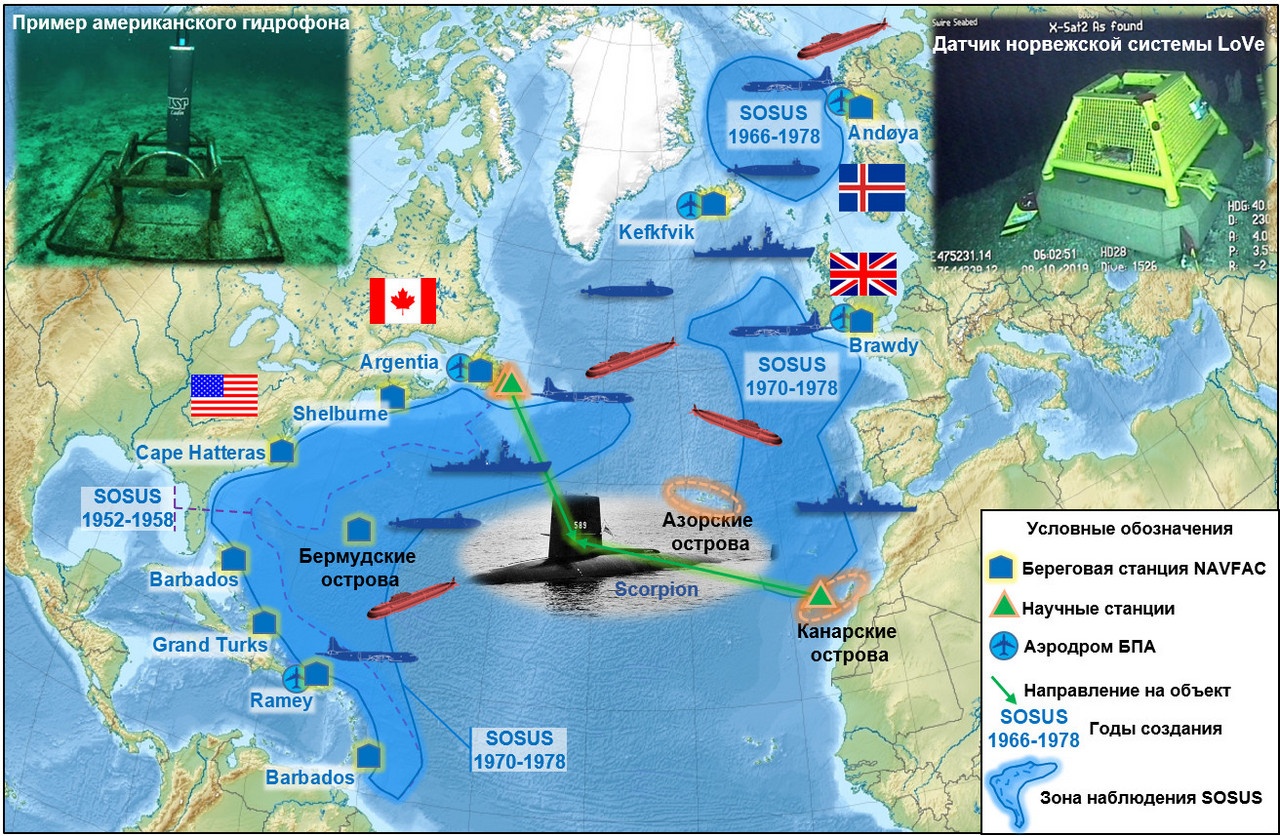 Зоны подводного наблюдения системы SOSUS на Атлантике к концу 1970-х годов.
Зоны подводного наблюдения системы SOSUS на Атлантике к концу 1970-х годов.С поступлением на флот новых РПЛСН с ракетами межконтинентальной дальности необходимость развёртывания их ближе к американским берегам отпала, и стратегическое значение SOSUS стало нивелироваться. Однако многоцелевым подводным лодкам надо было выходить «за угол» для выявления районов боевого патрулирования натовских ПЛАРБ, поэтому США вместе с союзниками по НАТО стали устанавливать SOSUS на маршрутах нашего вероятного развёртывания. Так, например, появились системы подводного наблюдения в Норвежском море и вдоль берегов Западной Европы, преграждая доступ в Средиземное море, однако варианты прошмыгнуть мимо всегда были…
SOSUS в одиночку не справляется
Но вернёмся в далёкие шестидесятые. В сентябре 1962 года советская подводная лодка Б-75 достигла Восточного побережья США и следовала вдоль границы территориального моря так близко, насколько позволяли глубины. Обнаружить что-либо, относящееся к береговой системе гидроакустического наблюдения, экипажу тогда не удалось. Но и развёрнутая к тому времени первая очередь SOSUS (показана пунктиром на рисунке выше) оказалась бессильна против неё.
Дело в том, что дно Атлантического океана в данном районе представляет собой равнинное плато с плавным увеличением глубины. Изобата 100 метров проходит на удалении от берега до 60 миль, а гидрофоны устанавливались значительно дальше. Ширина территориального моря США составляет три мили - то есть наш подводный разведчик, используя тактический приём времён Второй мировой войны, шёл между берегом и линией гидрофонов, смотрящих в другую сторону.
А между тем приближался известный Карибский кризис, когда в ходе операции «Кама» (составная часть операции «Анадырь» по перебазированию на Кубу 51-й ракетной дивизии РВСН) дизельные подводные лодки Северного флота поставили «на уши» Атлантический флот США. Обладая информацией о высокой активности советских субмарин в западной Атлантике, но, не имея достоверных сведений об их составе и замысле действий, штаб противолодочной войны вынужден был организовывать поисковые действия в обширном районе.
По воспоминаниям Эдварда Уитмена, участника программы создания системы подводного наблюдения, имело место обнаружение NAVFAC Grand Turks советской подводной лодки проекта 641 (одной из четырёх, действовавших в данном районе) с последующим подтверждением контакта самолётом базовой патрульной авиации (БПА). Была обнаружена и Б-75, но в надводном положении при приёме топлива от танкера «Терек». В то же время, по данным американских источников, с 22 октября по 5 ноября 1962 года противолодочные силы имели 29 контактов с подводными объектами (а их было всего пять), из которых классифицированы как POSITIVE - 7, PROBABLE - 2, POSSIBLE - 16, NON SAB - 4.
Система SOSUS, работавшая по зональному принципу, в одиночку не справлялась и давала результат лишь по мере накопления данных. Нетрудно догадаться, что требовалась высокая напряжённость противолодочных сил.
Например, против Б-59 действовала авианосная поисково-ударная группа (АПУГ) во главе с авианосцем Randolph (8-11 кораблей охранения). За Б-130 гонялась АПУГ авианосца Essex (до четырёх кораблей охранения) с применением палубной и базовой патрульной авиации, но не всегда успешно. Так, 11-я эскадрилья БПА с авиабазы Argentia (Ньюфаундленд) совершила огромное количество боевых вылетов впустую.
 Подводная лодка проекта 611 возвращается к родному причалу в Екатерининской гавани.
Подводная лодка проекта 611 возвращается к родному причалу в Екатерининской гавани.10 ноября 1962 года Б-75, успешно выполнив поставленные задачи, ошвартовалась к родному пирсу в Екатерининской гавани Полярного. По воспоминаниям современников, весь личный состав был награждён знаками «За дальний поход».
В 1968 году NAVFAC Keflavik впервые обнаружила советские атомные подводные лодки проектов 670 и 671 в Норвежском море. По данным из открытых источников можно предположить, что это были К-43 и К-38, за год до этого вошедшие в состав Северного флота. Ещё одним «подарком» для SOSUS стала РПЛСН проекта 667б, которая, по данным американцев, развёртывалась в Северную Атлантику в 1974 году. Вполне вероятно, это могла быть К-447 во время боевой службы с 29 ноября по 14 февраля 1975-го.
 Слева - К-43 пр. 670 в бухте Уллис, Владивосток перед передачей ВМС Индии в январе 1988 года; справа - К-38 пр. 671.
Слева - К-43 пр. 670 в бухте Уллис, Владивосток перед передачей ВМС Индии в январе 1988 года; справа - К-38 пр. 671.Но упомянутый 1968 год был щедр и на трагические «сюрпризы». В марте вместе с экипажем погибла подводная лодка Тихоокеанского флота К-129 в 735 милях северо-западнее атолла Мидуэй на глубине более 5 тыс. метров. В мае аналогичная участь постигла американскую SSN-589 Scorpion в 400 милях к юго-западу от Азорских островов на глубине 3 тыс. метров. Как определялись координаты мест их гибели, неизвестно, но скорее всего, для анализа использовались лофаграммы SOSUS, данные от океанографических и сейсмических станций, а также средств радиоперехвата донесений. Можно предположить, что тогда и возникла идея объединения разных источников в интегрированную систему, но известно об этом стало в 1980-х годах по другой причине.
Интеграция с кооперацией
Основным тактическим свойством любой подводной лодки является скрытность действий, которая у отечественных субмарин первого и второго поколений, мягко говоря, была не на высоте из-за повышенной шумности. Вопросы её снижения рассматривались на самом высоком уровне утверждением соответствующих программ, что постепенно приносило положительный результат при строительстве новых потаённых судов. Зоны подводного наблюдения SOSUS, и без того имевшие бреши, стали сокращаться.
Для их перекрытия в 1973 году американцы начали разработку мобильной низкочастотной пассивной гидроакустической системы с гибкой протяжённой буксируемой антенной SURTASS (Surveillance Towed Array Sensor System). По данной программе в качестве носителей к 1990 году было введено в строй 18 кораблей дальней гидроакустической разведки (ДГАР) типа Stalwart, ставшие первой частью интегрированной системы подводного наблюдения IUSS на просторах Атлантики и Тихого океана.
Преследование обнаруженных подводных лодок эти корабли не осуществляли и имели вид вполне мирных «белых пароходов» для океанографических исследований. Лишь флаг да раскраска дымоходов энергетической установки выдавали их принадлежность к ВМС США.
Информация об обнаружении чего-то подозрительного передавалась по космическому каналу связи на региональные центры подводного наблюдения для последующего анализа, а дальше всё как всегда - самолёт, буи, корабли…
Опыт эксплуатации этих кораблей выявил проблемы с недостаточной мореходностью и обитаемостью для длительных миссий. Поэтому с 1988 года американцы приступили к строительству океанских судов класса Victorious водоизмещением 3440 тонн с корпусом катамаранного типа. Такая конструкция обеспечивает большую устойчивость на малых ходах при буксировке антенны в сложных гидрометеоусловиях. Головной корабль был принят в состав ВМС в 1991 году, аккурат к завершению холодной войны.
 Корабли ДГАР: слева - Stalwart, 1986 г., справа - Loyal, 2001 г. На корме размещается оборудование для постановки антенны SURTASS.
Корабли ДГАР: слева - Stalwart, 1986 г., справа - Loyal, 2001 г. На корме размещается оборудование для постановки антенны SURTASS.Из-за снижения советской/российской подводной угрозы, когда наши корабли оказались «привязанными» к причалам, США стали сокращать финансирование отдельных программ в рамках IUSS. Береговые посты SOSUS, как и корабли типа Stalwart, передавались гражданским структурам для научных исследований. В то же время, необходимость строительства и содержания большого количества кораблей ДГАР отпала. По проекту Victorious в 1991 - 1993 гг. было введено в строй всего четыре корабля (Victorious, Able, Effective и Loyal) и пятый в 2000 году по проекту Impeccable водоизмещением 5368 тонн. Местом их постоянной «прописки» стал Тихий океан.
«Ноу-хау» США для нас уже не секрет
Уже тогда было очевидно, что Китай стремительно идёт к получению статуса морской державы. В 1994 году он стал третьей судостроительной страной в мире, уступив только Южной Корее и Японии, а в 1995-м провозгласил военно-морскую доктрину, предусматривающую создание ВМС, способных не только отразить агрессию с моря, но и нанести превентивные удары по противнику. А за столь серьёзными намерениями уже надо было наблюдать, в том числе и под водой. Корабли ДГАР этой серии получили новое гидроакустическое вооружение - к пассивной SURTASS добавили активную низкочастотную станцию LFA (Low Frequency Active).
 Положение кораблей ДГАР в Тихоокеанском регионе осенью 2023 года.
Положение кораблей ДГАР в Тихоокеанском регионе осенью 2023 года.Как показывают мониторинговые ресурсы, система SURTASS LFA активно эксплуатируется на Тихом океане по сей день, хотя корабли уже не молоды.
Между тем проблем под водой для США прибавилось. Возрождается флот России, повышается активность ВМС НОАК, новые подводные лодки вводятся и в состав ВМС КНДР.
По этой причине с 2022 года Вашингтон приступил к строительству 7 новых кораблей ДГАР водоизмещением 8500 тонн, которые войдут в состав ВМС до 2031 года. Кроме SOSUS и SURTASS LFA в состав IUSS включаются и позиционные системы подводного наблюдения, устанавливаемые на дне океанов и морей различными носителями. В отличие от зонального принципа работы SOSUS, эти средства ставятся на рубежах (в проливных зонах) и срабатывают при их прохождении.
Известно, что с 1988 года американцы создавали антенные поля системы FDS (Fixed Distribution System) в передовых прибрежных районах для обнаружения малошумных подводных лодок. В ряде источников утверждается, что в настоящее время она установлена в западной части Атлантики в районе полуострова Флорида. Развитием FDS стала более компактная система освещения подводной обстановки ADS (Advanced Deployable System), разработанная для многократного использования с надводных кораблей и подводных лодок. Включаются в IUSS и системы TACTAS (Tactical Towed Array Sonar) и STASS (Submarine Towed Array Sensor System), с которыми мы хорошо знакомы по опыту боевых служб.
Сорок лет тому назад, 31 октября 1983 года в Саргассовом море советская подводная лодка К-324 при слежении за американским фрегатом McCloy оборвала и намотала на свой винт его антенну TACTAS. События могли получить драматическое развитие, но всё обошлось более-менее благополучно и секретное «ноу-хау» американского флота досталось нам.
Аналог системы STASS в Баренцевом море в декабре 1986 года «добыла» с британской субмарины советская РПЛСН ТК-12. Еженедельник «Звезда» рассказывал об этом эпизоде холодной войны.
 Интегрированная система подводного наблюдения.
Интегрированная система подводного наблюдения.Сегодня IUSS состоит из стационарных, манёвренных и развёртываемых акустических систем, которые через единую сеть обмена данными предоставляют информацию о подводной обстановке в зонах повышенного внимания со стороны США и НАТО. И это не только Китай, как считает агентство Reuters. За 70 лет своего развития, начиная с системы SOSUS, интегрированная система подводного наблюдения прошла не одну модернизацию и продолжает совершенствоваться. Имеются данные о том, что в качестве элементов манёвренных систем планируется применять безэкипажные аппараты, новые авиационные буи и оборудование коммерческого производства.
В Пентагоне уверены, что благодаря усовершенствованной системе подводного наблюдения маршруты российских атомных ракетоносцев уже не являются для них секретом. Однако подводный флот нашей страны тоже не стоит на месте: появляются новые корабли с другими возможностями, способные незаметно подойти к побережью любой страны.